
Optimal Path Generation
After localization and ball detection have been successfully performed, the path generation module is used to find the best possible path to the ball. For this we use a geometry based approach which provides quick results.
Obstacles are modeled as circles and arcs of concentric circles are taken as the shortest route around the obstacles. Shortest distance between two points not blocked by an obstacle is the straight line joining the two points, whereas the cost is decided based on various factors like the time it takes for AcYut to turn in comparison to straight line walk.
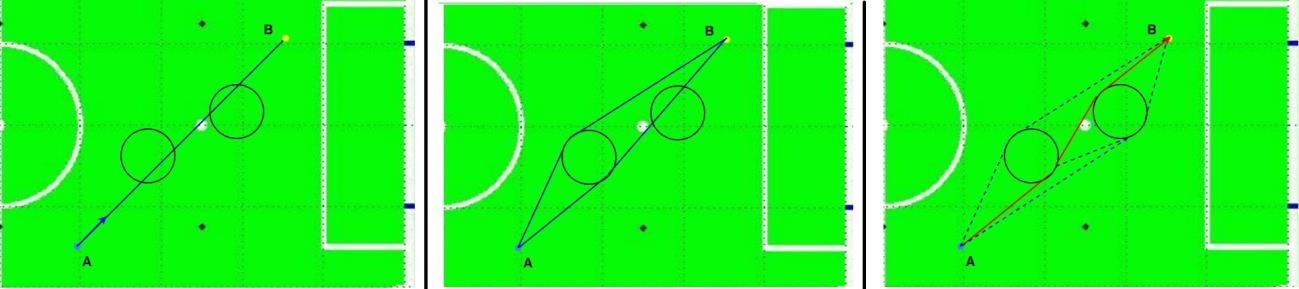 Start point A and End Point B hindered by two obstacles. Drawing tangents to the first obstacle encountered o at o1 o2 o3 and o4. Recursively following the same function. Using Dijkstra’s Algorithm to find the final path in Red.
Start point A and End Point B hindered by two obstacles. Drawing tangents to the first obstacle encountered o at o1 o2 o3 and o4. Recursively following the same function. Using Dijkstra’s Algorithm to find the final path in Red.

AcYut - meaning 'The Imperishable' in Sanskrit, is the name of the series of humanoids being developed at the Centre for Robotics and Intelligent Systems by a team of undergraduates under the guidance of Dr. B.K. Rout at the Birla Institute of Technology and Science, Pilani, India.
Useful Links
Contact Us
Birla Institute of Technology and Science
Pilani, Rajasthan, India - 333031
Email: contact@acyut.com
2016 © All Rights Reserved.